- Toate
- Teste cultura generala
- Teste psihologice
- Teste matematica
- Teste romana
- Teste anatomia omului
- Teste de botanica
- Teste filme
- Teste din istorie
- Teste de geografie
- Teste din astronomie
- Teste de logica
- Teste de chimie
- Teste de zoologie
- Teste despre desene animate
- Teste muzica
- Teste vedete
- Teste compatibilitate
- Mini-teste
- Teste haioase
- Teste fete
- Teste baieti
- Teste iubire
- Teste din referate pentru scoala






Afla ca sa stii


Jurnalul lui Aurel
De ce parintii fac pe politistul bun si politistul rau? Ai vazut probabil in filme cu politisti ca o echipa este formata din unul bun si unul rau. Si daca recunosti tiparul, sigur ti-ai dat seama...
› citeste mai multStiri


Bancul zilei
Culmea zgarceniei sa iti ia foc casa iar tu sa dai bipuri la pompieri.
› vrei mai multCultura generala
Fructul de kiwi are in medie mai multa vitamina C decat o portocala.
› vrei mai multTeste recomandate
Ghiceste cele 10 logo-uri auto! - testul 4
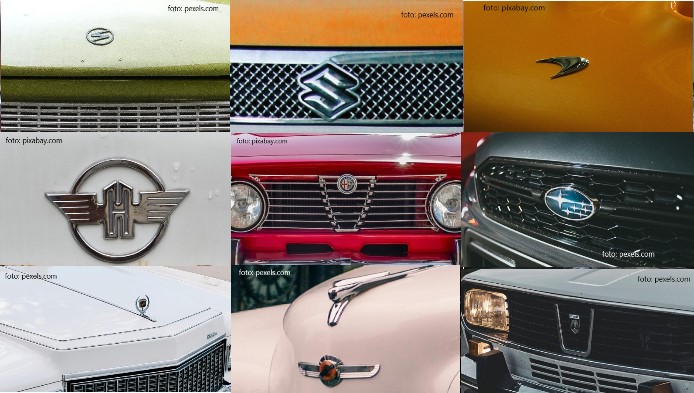
Ghiceste cele 10 logo-uri auto! - testul 3

Shop Clopotel.ro

39.99 RON
Ghiceste cele 10 logo-uri auto! - testul 2
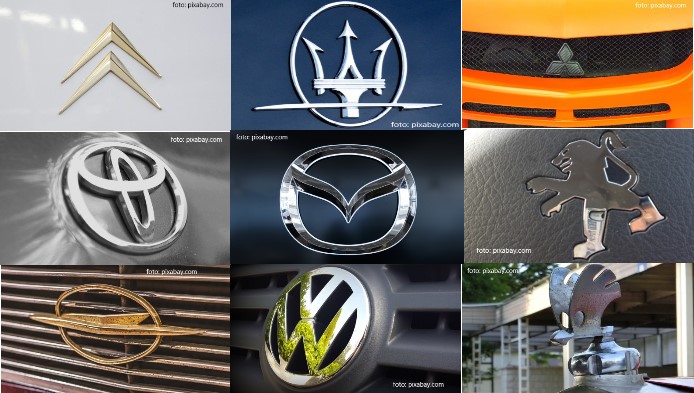
Ghiceste cele 10 logo-uri auto!
